USE CASE: Digital physiotherapy with edge swarm technology
No more limits to traditional physiotherapy! SmartEdge introduces a groundbreaking solution that breaks free from closed ecosystems and subjective assessments. Our innovative approach ensures precise evaluation and timely feedback, transforming the way pain, muscular resistance, and treatment progress are monitored.
Commercial solutions in the market and current physiotherapy practices have several significant limitations, including closed technological ecosystems, subjective assessment, inaccurate precision, and a lack of reliable and timely feedback that can lead to an inadequate evaluation of pain, muscular resistance, and the evolution of the treatment.
SmartEdge solution for physiotherapy
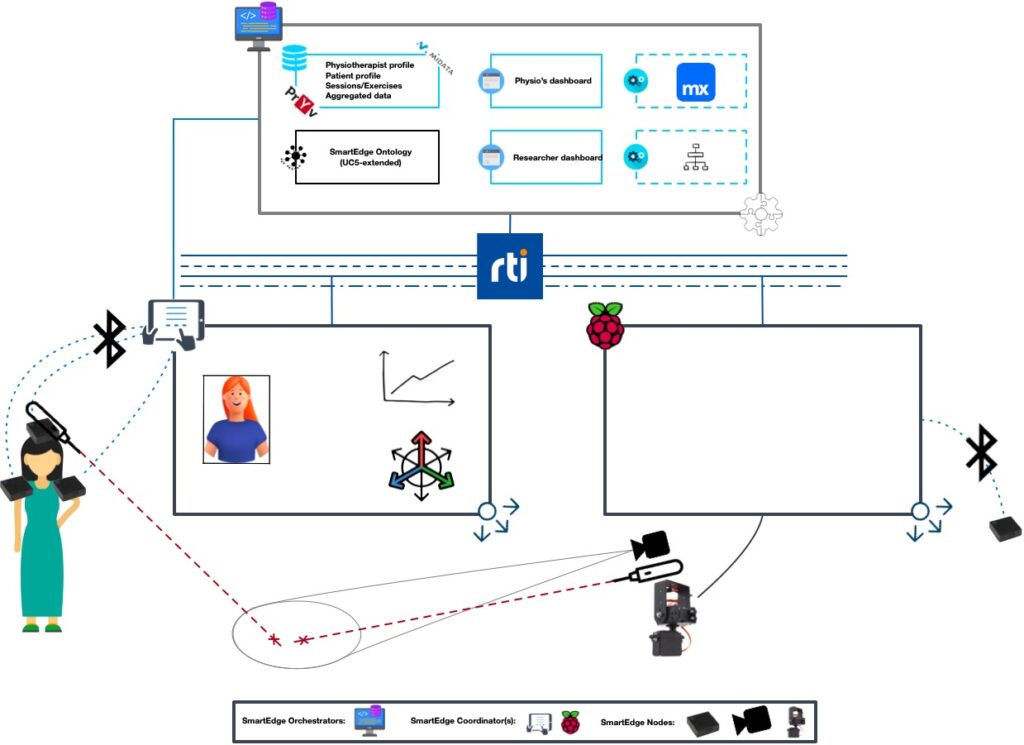
In the context of SmartEdge, we target a physiotherapy scenario, aiming at showcasing the usage of the SmartEdge solution to (i) enable multi-joint tele-rehabilitation guided by an anthropomorphic avatar-based UI, leveraging wearable and environment nodes that join the swarm; and (ii) to allow the dynamic formation and edge participation in the swarm.
In particular, head and neck rehabilitation and physiotherapy can be necessary for chronic conditions and for recovery from injuries or surgical interventions. The proposed solution is antipodal w.r.t. to traditional treatments (often observation-based and through episodic verification of the therapist). Patients can perform prescribed exercises at home supported by personalized assistive technologies and in the hospital during the visit, observing the same protocol and measurements.
The envisioned solution may entail the interoperation of heterogeneous sensor nodes (i.e., wearable/environmental) dynamically, as well as the involvement of user interfaces to engage the patient and monitor the ongoing sessions and long-term evolution.
Integration of wearable technology and environmental sensors
In doing so, the use case will show how heterogeneous sensors and edge devices can interoperate and work towards a common goal, following self-organizing patterns and combining diverse complementary functionalities. In this use case setting, a patient will be wearing a set of wearable sensors (e.g., Nordic Thingy52 equipped with accelerometer, gyroscope, mini speakers, etc.) and capturing the movements of neck, head, and shoulders. Meantime, each patient will have access to a tablet providing on-time feedback (visual/auditive indicators guiding and providing feedback on the running exercise) and access to personalized exercise and progress monitoring.
Additionally, environment sensors deployed in the room will contribute with data related to external conditions (e.g., temperature, C02, luminosity, etc.) which may have an incidence on the exercises and therapeutic recommendations. Providing additional cues, motivation, and persuasion support, an anthropomorphic avatar in the tablet UI will be provided to the patient, reacting, and interacting according to the therapy goals and achievements of the participant.
Multi-patient challenges and semantic models
 Moreover, the patient may need in-time feedback about the exercise. Extending this scenario to a multi-patient setting entails additional challenges (e.g., cross-swarm sensor heterogeneity, activities to be detected, and scaling to real-time multi-patient monitoring). Indeed, different patients might follow their own specific therapy, having different therapies/prescriptions and body parts to rehabilitate.
Moreover, the patient may need in-time feedback about the exercise. Extending this scenario to a multi-patient setting entails additional challenges (e.g., cross-swarm sensor heterogeneity, activities to be detected, and scaling to real-time multi-patient monitoring). Indeed, different patients might follow their own specific therapy, having different therapies/prescriptions and body parts to rehabilitate.
Therefore, it is essential that beyond the real-time interactions within the sensing ecosystem, a digital rehabilitation system must also rely on semantic models for representing information within the swarm devices across patients and healthcare providers, using technology standards such as RDF for the description of the device’s capabilities, and enabling the formation and orchestration of the swarm.
Authors: Prof. Jean-Paul Calbimonte and Dr. Davide Calvaresi (HES-SO, Switzerland)